Underwater LBL Positioning Systems
Highly accurate underwater acoustic positioning
S2C R LBL systems bring the benefits of long baseline (LBL) acoustic positioning to offshore and maritime applications that demand highly accurate results.
An array of geo-referenced baseline S2C R LBL nodes, deployed at the operation site, allows tracking and navigating the targets with very high precision and accuracy that do not depend on the depth.
The integrated full-duplex digital communication link enhances the S2C R LBL system with a combined tracking and communication functionality, opening new possibilities for a wide range of applications.
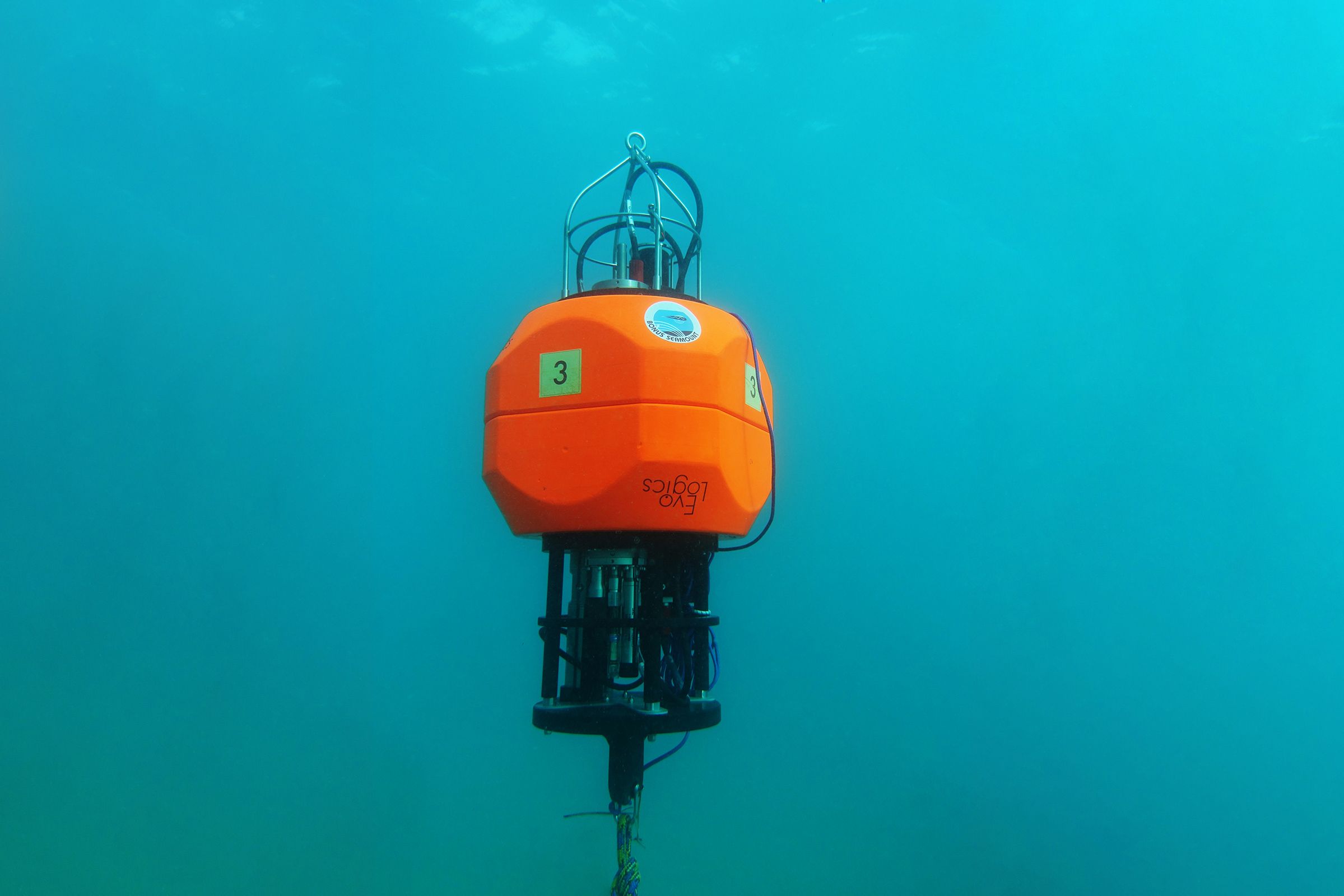
An LBL system features EvoLogics R-series devices in S2C Beacon configuration as baseline nodes.
Key Features
-
Patented S2C (Sweep Spread Carrier) Technology - spread spectrum technology based on extensive bionic studies
-
Accurate LBL positioning with 1.5cm accuracy
-
Combined LBL positioning and data transmissions
-
Can be used in Silent LBL mode (hyperbolic positioning algorithm)
-
Self-adaptive algorithms for reliable performance in adverse underwater conditions, built-in forward error correction and data compression
-
Advanced communication protocol with several data delivery algorithms:
-
send and receive large volumes of data with the highest bitrate possible in current conditions;
-
send and receive short instant messages without interrupting the main data flow between devices
-
Addressing and networking: build relay chains and underwater networks with broadcasting capabilities
-
Low power consumption and additional power-saving options
APPLICATIONS

Positioning of offshore equipment
Highly accurate tracking of offshore equipment during installation to ensure accurate placement at predetermined coordinates

Navigation of ROVs and AUVs
Track positions of multiple ROVs or AUVs and control their missions with instant commands

Cartography
Locate underwater features with geo-referenced coordinates when used together with GPS or differential GPS
Geodesy and seismics
Track small sea-floor movements caused by tectonic drifting or landslides
Sensor tracking
Highly accurate tracking of sensitive sensors and detectors, such as those used in neutrino telescopes, to compensate the drift caused by underwater currents
Silent LBL
Silent operating mode for 'underwater GPS' navigation
HOW IT WORKS
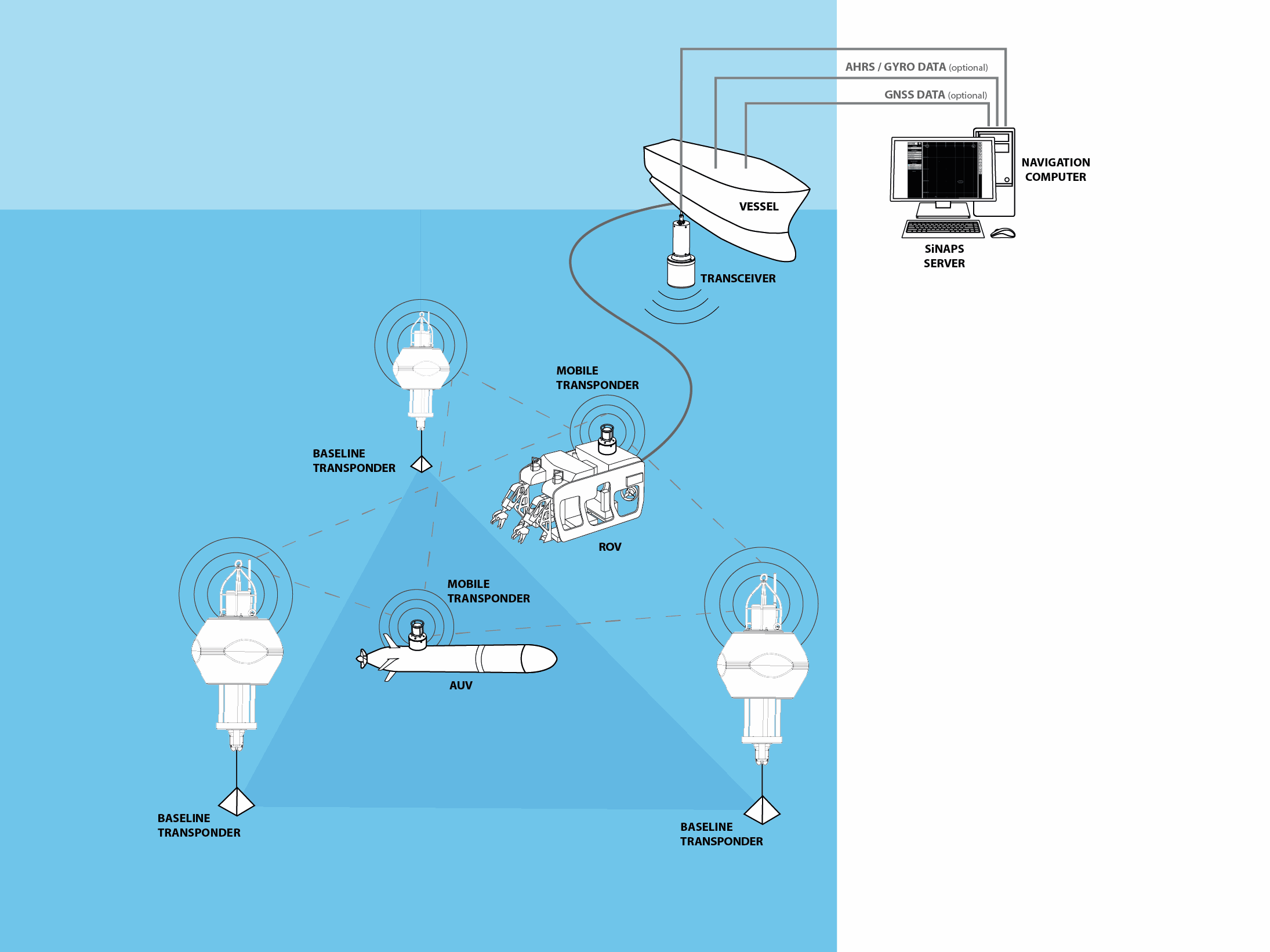
A typical EvoLogics LBL (long baseline) positioning system is pictured above and operates as follows.
An array of so-called BASELINE TRANSPONDERS is moored on the seafloor and geo-located: the exact coordinates are known, so these transponders are used as reference points for determining target positions. Baseline transponders reply to acoustic interrogation signals from target-mounted transponders with their own acoustic pulses, allowing a target to calculate its position by measuring the distance between itself and each transponder of the baseline array.
Baseline transponders are either mounted in sea-floor stands or equipped with acoustic release mechanisms and flotation collars for easier recovery to the surface. They are deployed around the work site and geo-located during a calibration procedure prior to LBL system operation.
TARGET TRANSPONDERS are mounted on positioning targets, for example, on autonomous underwater vehicles (AUVs), remotely operated vehicles (ROVs) etc., and use acoustic signals to determine distances to baseline nodes.
A GNSS receiver is installed on the vessel for accurate calibration of the baseline transponder array after its deployment. During calibration, the vessel moves above the deployed baseline transponders to accurately determine their location. Coupled with the VESSEL TRANSCEIVER, the GNSS receiver provides the baseline nodes’ positions in real-world coordinates.
Third-party or built-in AHRS sensor (Attitude and Heading Reference System) provides information about the vessel’s orientation during calibration to eliminate positioning errors.
The NAVIGATION COMPUTER is installed on the vessel, interfaced with the vessel transceiver and other external instruments and connected to the local computer network. EvoLogics positioning software, the SiNAPS, and the Transponder communication utility, a web-based tool to monitor and control the baseline transponders, are accessible from the navigation computer to configure, control and monitor the mission.
S2C R LBL - PRODUCTS
HIGH SPEED MID-RANGE DEVICES

18/34
Fast devices for mid-range horizontal transmissions. All-round performer
Frequency: 1 8 - 34 kHz
Acoustic Connection: up to 13.9 kbit/s
Operating Range: 3500 m
Directivity: several versions available

42/65
High-speed devices for mid-range vertical and slant transmissions
Frequency: 42 - 65 kHz
Acoustic Connection: up to 31.2 kbit/s
Operating Range: 1000 m
Directivity: wide-angle (100 degrees)

48/78
High-speed devices for mid-range horizontal transmissions
Frequency: 48 - 78 kHz
Acoustic Connection: up to 31.2 kbit/s
Operating Range: 1000 m
Directivity: horizontally omnidirectional

HS
High-speed device for short-range transmissions in shallow waters
Frequency: 120 - 200 kHz
Acoustic Connection: up to 62.5 kbit/s
Operating Range: 300 m
Directivity: omnidirectional
DEPTH-RATED LONG-RANGE DEVICES

15/27
Depth-rated devices for long-range vertical or slant transfers
Frequency: 15 - 27 kHz
Acoustic Connection: up to 9.2 kbit/s
Operating Range: 6000 m
Directivity: wide-angle (120 degrees)
12/24
Depth-rated devices for long-range vertical or slant transfers
Frequency: 13 - 24 kHz
Acoustic Connection: up to 9.2 kbit/s
Operating Range: 6000 m
Directivity: conical (70 degrees)

7/17
Depth-rated devices for long-range horizontal, vertical or slant transfers
Frequency: 7 - 17 kHz
Acoustic Connection: up to 6.9 kbit/s
Operating Range: 8000 m
Directivity: several versions available