EvoLogics Sonobot with object recognition aids a diver mission in Hemmoor
Integrated systems that offer a synergy of technologies are gaining traction for optimizing underwater operations. In August 2023, EvoLogics successfully combined their object recognition in side-scan sonar imaging of the Kreidesee lakebed with acoustic communication and tracking for divers, who received a waypoint for investigating what the Sonobot had discovered.
The Kreidesee in Hemmoor
The Kreidesee (German for “chalk lake”) in Hemmoor, Germany, is a former chalk mining quarry that has been transformed into a unique recreational diving site. The lake is 60 meters deep and is known for good visibility, as the water is poor in nutrients and therefore free from algae.
Freshwater filled the mine after mining activities ceased in the 1970s. The encircling factory buildings were dismantled, with some being submerged in the lake's waters to fortify the edges. During the 2000s, the lake evolved into a sought-after diving spot, and a dive center was established near the entrance to the area.
Today, the crystal-clear waters attract divers from around the world, offering a unique underwater experience. The old structures that pre-date the flooding still stand in the depth, and some wrecks - cars, trucks, boats, and even a single-engine plane - have been deliberately placed in the lake, adding further appeal to the site.
The distinct underwater infrastructure and the excellent water quality render the site a great location for testing and demonstrating underwater equipment, and in August 2023 team EvoLogics conducted their first trials at the diving center, performing a complex object recognition and diver coordination mission with the Sonobot 5 surface vehicle and the company’s new acoustic tracking technology for divers.
EvoLogics object recognition guides divers toward discovered assets
The compact Sonobot 5 uncrewed surface vehicle from EvoLogics has established itself as one of the company’s core products. The vehicle is available with several hardware options that cater to various missions, with side-scan sonar coupled with an object recognition module offered on the market since 2020. This configuration enables riverbed and seafloor side-scan sonar imaging enhanced with automatic detection of objects. The AI-based system is an extra module that runs directly onboard the Sonobot and analyzes raw side-scan sonar output. Objects of interest are detected and visually highlighted in the onshore operator’s control software live during the mission.
In Hemmoor, EvoLogics deployed the Sonobot 5 to detect an underwater object placed on the lake floor, having previously trained the AI system for this object class. After “discovery” in the side-scan sonar feed, the object’s location was automatically transmitted to SiNAPS, the EvoLogics positioning software tracking a team of divers, as a point of interest to investigate during their mission.
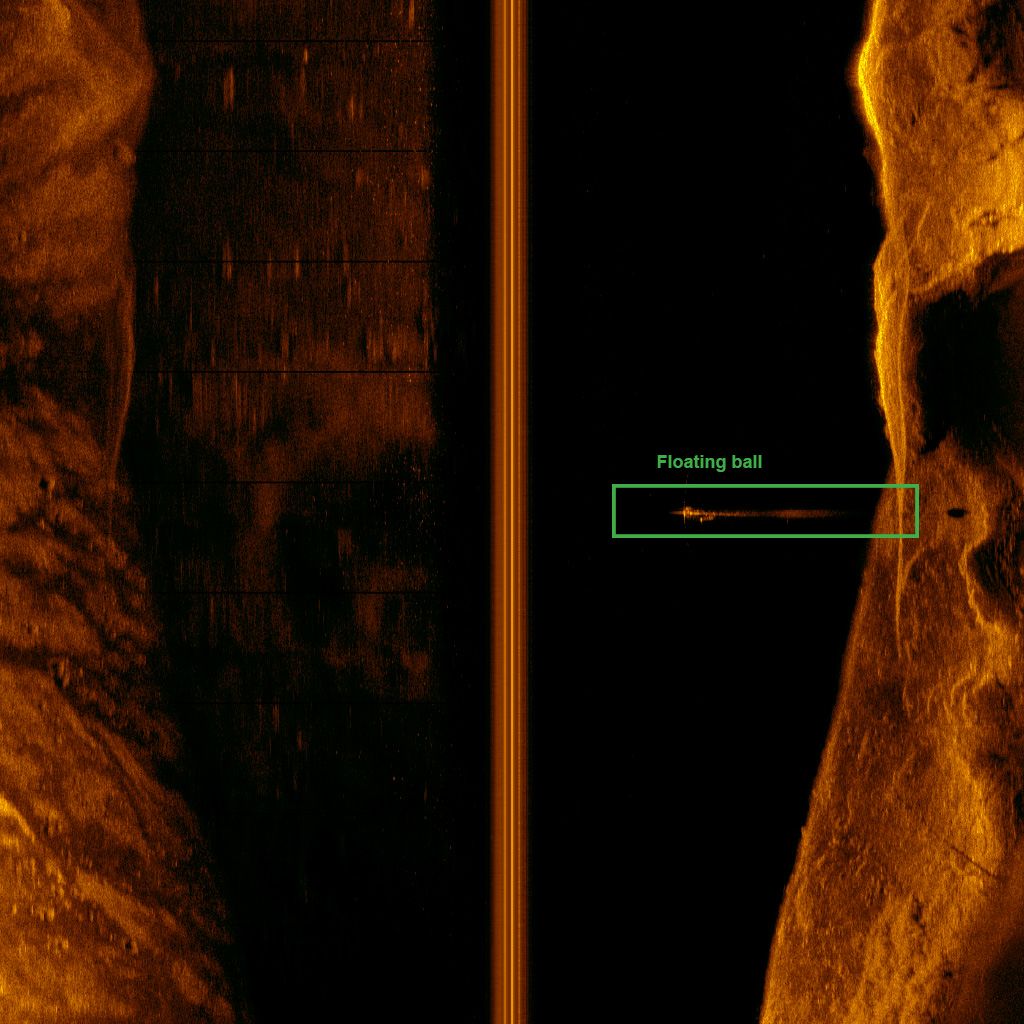
Sonobot Neptus control software highlights the detected object in the side-scan sonar imagery

EvoLogics S2C T 18/34 underwater acoustic modem in molded diver tracker configuration
EvoLogics diver tracking system
EvoLogics is in the final testing phases of an acoustic diver tracking system that simplifies complex underwater tasks involving multiple team members, like search and rescue, salvage, recovery, or cleanup operations. This system enables better coordination through two-way communication among divers and between divers and the surface dive supervision team. This improves task management and information sharing, making diver operations more effective.
EvoLogics uses the compact battery-powered 18/34 T-series "tiny" acoustic modems as the diver trackers, with the acoustic transducer positioned on the diver's back for unobstructed signal transmissions. The lightweight system easily connects to scuba gear with minimal adjustments, and EvoLogics is currently testing out several molded unibody designs tailored for various diving equipment to ensure broad compatibility and simple installation.
The surface acoustic node for the operation is the USBL buoy, EvoLogics’ mono-unit with a USBL antenna, integrated PC running SiNAPS positioning software, dual-antenna GNSS receiver, and WiFi access point. It is designed for mobile scenarios with a speedy setup and fully supports diver tracking with bidirectional message exchange.
The diver console is a compact wrist tablet that connects to the modem tracker by cable. It provides the diver access to the SiNAPS user interface, visualizing the map of the current operations area, the positions of all divers and the support vessel, and running the text chat tool.
The USBL buoy uses acoustic signals to calculate diver positions and display them in the support team’s SiNAPS. This allows the surface team to oversee divers, monitor their positions, communicate messages, and adjust mission waypoints. With bidirectional acoustic links, all mission divers gain access to tracker positions.
Just like texting on a smartphone, SiNAPS allows the divers to exchange short messages with each other and the surface, and track each other’s positions in real-time. Map waypoints can be added before or even during the mission to coordinate operations, and mark discovered objects or infrastructure for further investigation.
Setting up SiNAPS waypoints during a diver mission was extensively tested in Hemoor, with points of interest added by the surface team, by the divers underwater, and automatically imported from the Sonobot control software after object discovery.
Object recognition for coordinating the diver mission
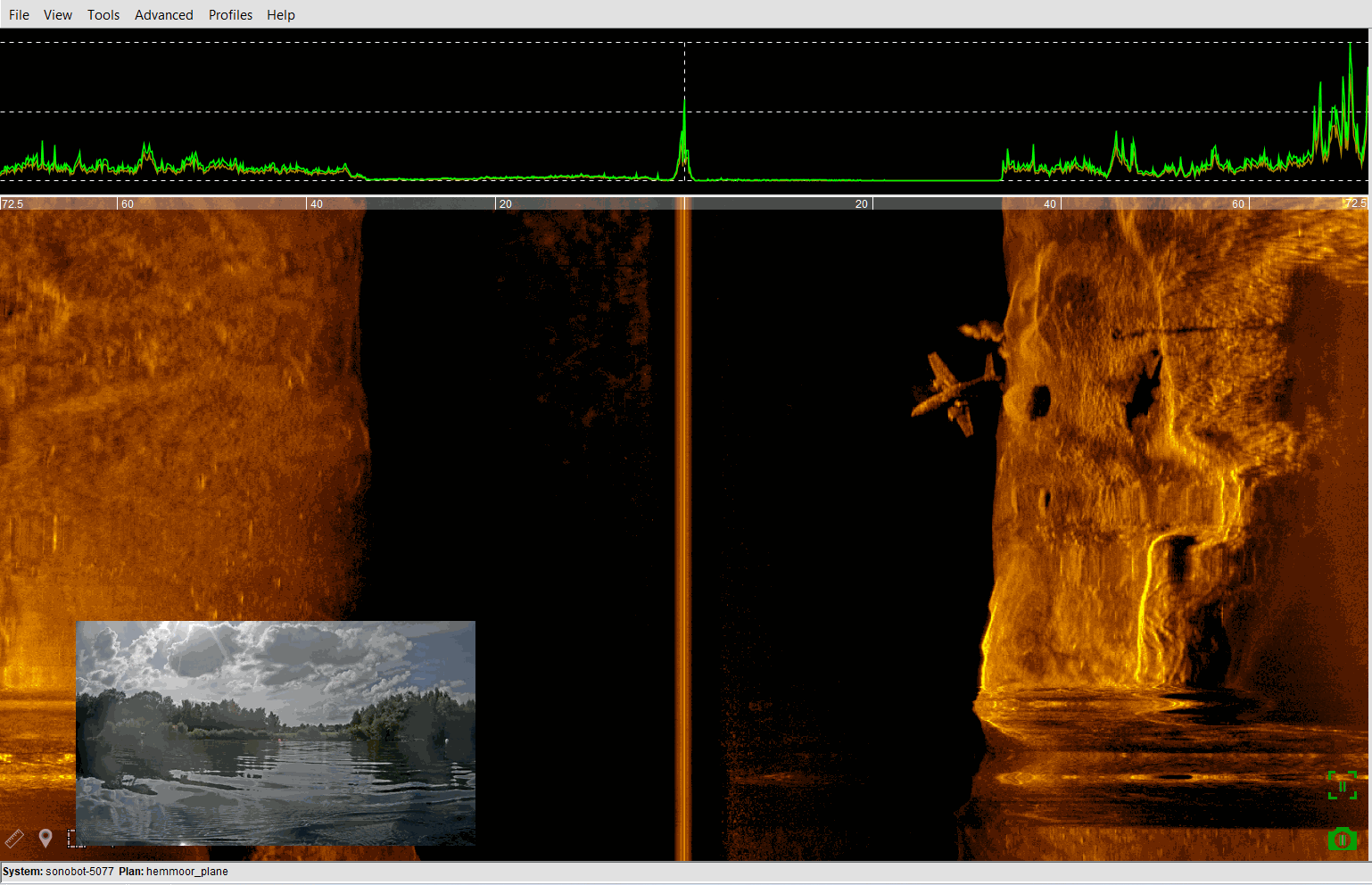
As luck would have it, the underwater test object for the joint Sonobot-diver mission was placed near an exciting Kreidesee diver attraction - the sunk Piper Aerostar 601 airplane showed up in side-scan sonar imagery during a test run with the Sonobot side-scan sonar.
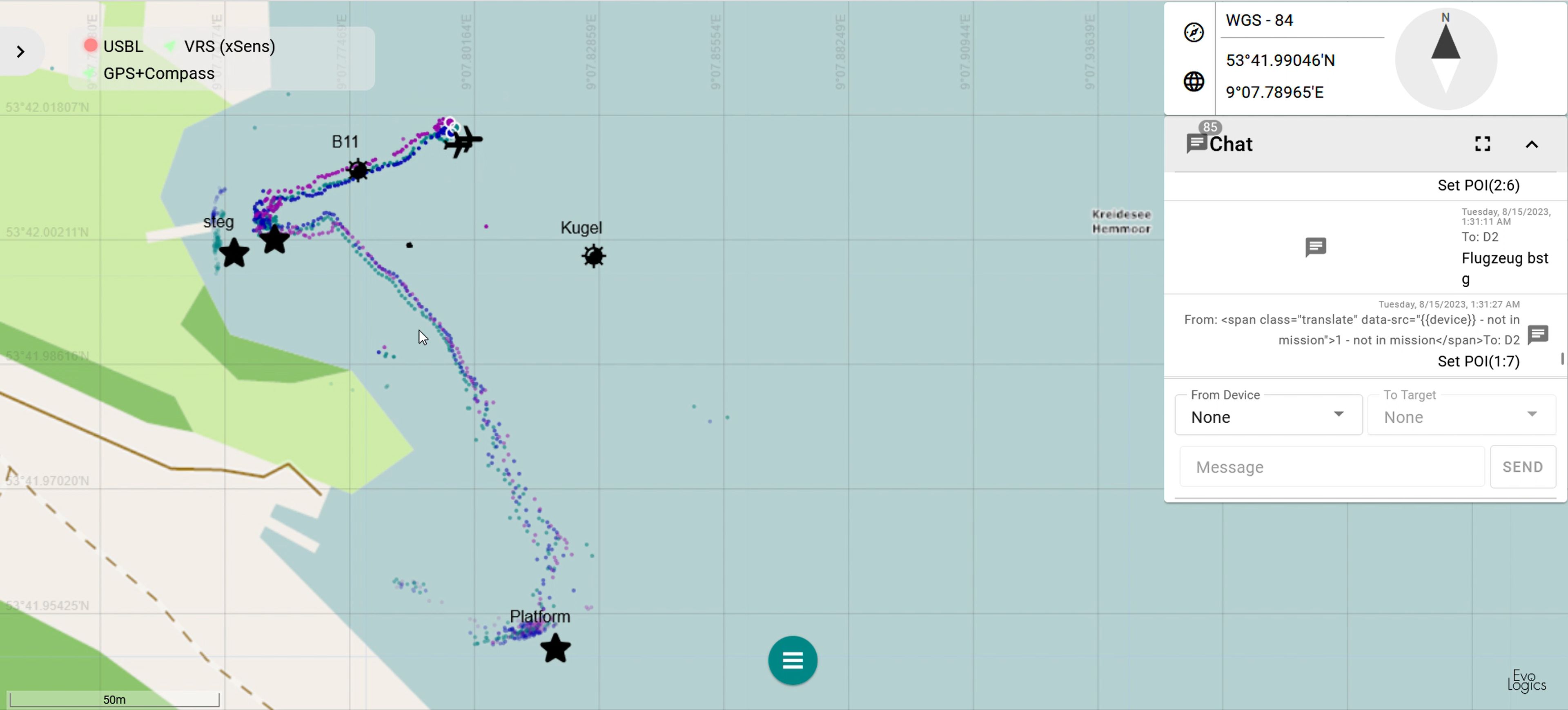
A screenshot of SiNAPS positioning software during the mission - three divers traveled to the B11 object discovered by the Sonobot, then to the plane submerged in the lake
The Kreidesee trials demonstrated a deep integration of EvoLogics technologies, proving how an uncrewed surface vehicle can effectively support a diver team on a search task. Such missions can significantly benefit from efficient information exchange and advanced automation, the main vectors of ongoing development work at EvoLogics. And the team is packing again - the Sonobot-aided diver coordination system is set for a Fall trip to Portugal for further field action.
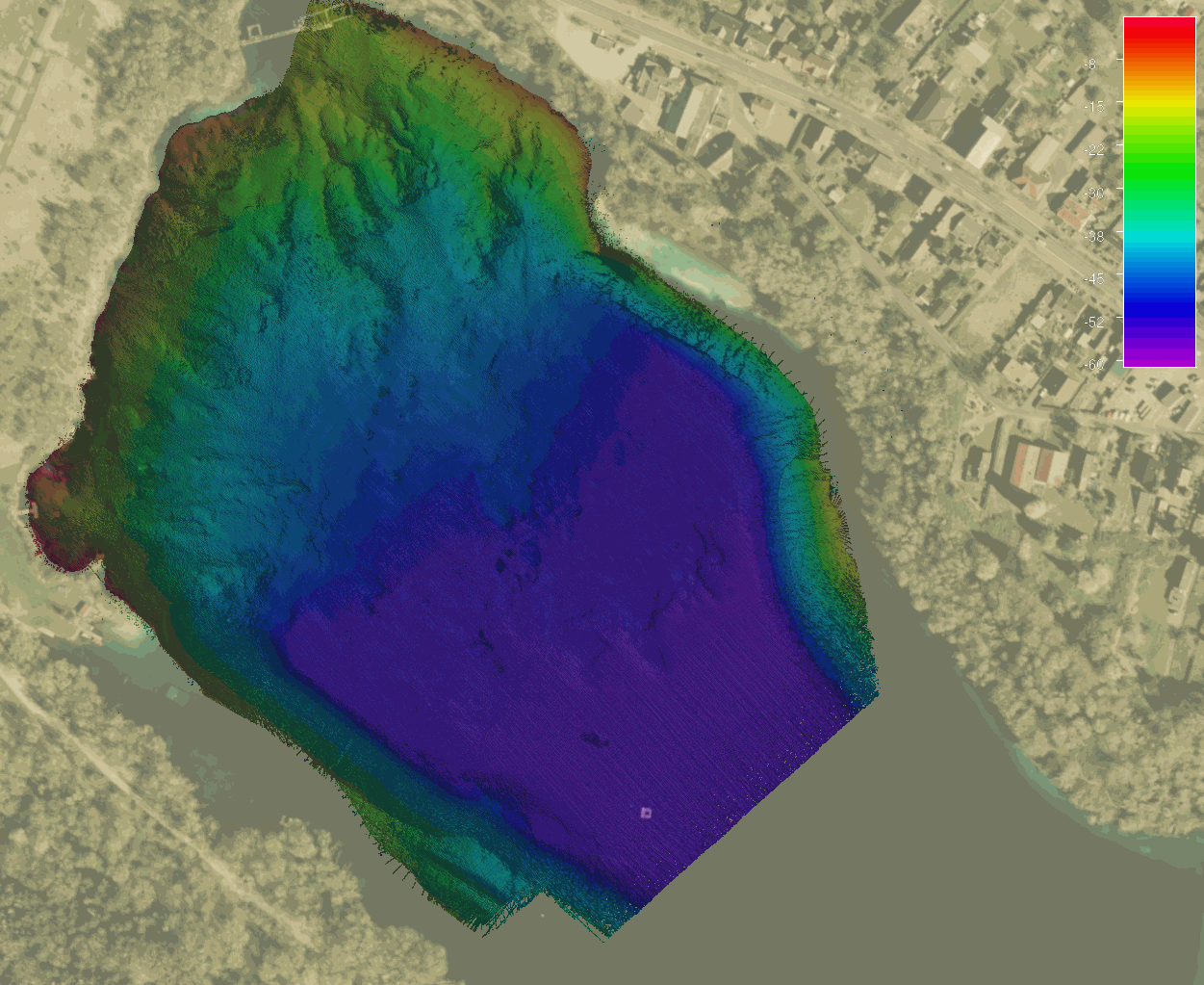
Bathymetry of the area taken with the new EvoLogics Multibeam
This article was originally published in the Ocean News and Technology magazine, September 2023 issue.